Pendulum ຂອງ LMEC-7 Pohl
LMEC-7Pendulum ຂອງ Pohl
ການທົດລອງ
1.Free oscillation – ການວັດແທກຂອງການຕອບສະຫນອງລະຫວ່າງຄວາມກວ້າງຂວາງຂອງລໍ້ການດຸ່ນດ່ຽງθແລະໄລຍະເວລາຂອງ oscillation ຟຣີ T
2.ການກໍານົດປັດໄຈການປຽກຝຸ່ນβ.
3.Determination of the amplitude-frequency characteristic and the phase-frequency curves characteristic of forced vibrations.
4.Study ຂອງຜົນກະທົບຂອງ damping ທີ່ແຕກຕ່າງກັນກ່ຽວກັບການສັ່ນສະເທືອນບັງຄັບແລະການສັງເກດການປະກົດການ resonance.
5. ຮຽນຮູ້ທີ່ຈະນໍາໃຊ້ວິທີການ stroboscopic ເພື່ອກໍານົດປະລິມານການເຄື່ອນໄຫວຂອງວັດຖຸຈໍານວນຫນຶ່ງ, ເຊັ່ນ: ຄວາມແຕກຕ່າງໄລຍະ.
ຂໍ້ມູນຈໍາເພາະຕົ້ນຕໍ
| ປັດໃຈຄວາມດື້ດ້ານພາກຮຽນ spring K | ຫນ້ອຍກວ່າ 2% ການປ່ຽນແປງໃນໄລຍະເວລາສັ່ນສະເທືອນຟຣີ |
| ການວັດແທກເວລາ | ຄວາມຖືກຕ້ອງ 0.001s, ການວັດແທກຮອບວຽນຜິດພາດ 0.2% |
| pendulum ກົນຈັກ | ມີຊ່ອງໃສ່ດັດຊະນີ, ດັດສະນີ 2°, ລັດສະໝີ 100 ມມ |
| ການວັດແທກຄວາມກວ້າງຂວາງ | ຜິດພາດ ±1° |
| ເຊັນເຊີ Photoelectric A | ການກວດຫາສັນຍານ photoelectric ສອງເທົ່າ |
| ເຊັນເຊີ photoelectric B | ການກວດຫາສັນຍານ photoelectric ດຽວ |
| ຊ່ວງຄວາມໄວຂອງມໍເຕີ (ຄວາມຖີ່ຂອງການບັງຄັບ). | 30 – 45 rpm ແລະປັບຢ່າງຕໍ່ເນື່ອງ |
| ຄວາມໄວມໍເຕີບໍ່ສະຖຽນລະພາບ | ຫນ້ອຍກວ່າ 0.05%, ຮັບປະກັນວົງຈອນການທົດສອບທີ່ຫມັ້ນຄົງ |
| ການປຽກລະບົບ | ໜ້ອຍກວ່າ 2° ຕໍ່ການເສື່ອມຂອງຄວາມກວ້າງໃຫຍ່ |
ລາຍລະອຽດ
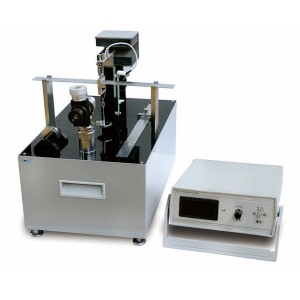
ອົງປະກອບຂອງລະບົບ: ອຸປະກອນທົດລອງ Pohl resonance, ການຄວບຄຸມການທົດລອງ resonance Pohl, ການປະກອບ flash ແຍກຕ່າງຫາກ, 2 ເຊັນເຊີ photoelectric (ແຕ່ລະປະເພດ A ແລະປະເພດ B)
ການຕິດຕັ້ງແບບທົດລອງຂອງ Pohl resonance.
1. ພາກຮຽນ spring stubbornness ປັດໄຈ K: ຫນ້ອຍກ່ວາ 2% ການປ່ຽນແປງໄລຍະເວລາ vibration ຟຣີ.
2. ການວັດແທກເວລາ (10 ຮອບ): ຄວາມຖືກຕ້ອງ 0.001s, ການວັດແທກຮອບວຽນຜິດພາດ 0.2%.
3. ການປຽກລະບົບໃນເມື່ອບໍ່ມີການປຽກແມ່ເຫຼັກໄຟຟ້າ: ໜ້ອຍກວ່າ 2° ຕໍ່ການທຳລາຍຂອງຄວາມກວ້າງໃຫຍ່ໄພສານ.
4. ທໍ່ກົນຈັກ: ມີຊ່ອງດັດສະນີ, ດັດສະນີ 2°, ລັດສະໝີ 100 ມມ.
5. ການວັດແທກຄວາມກວ້າງໃຫຍ່ໄພສານ: ຄວາມຜິດພາດ ±1°; ວິທີການວັດແທກຄວາມກວ້າງຂວາງ: ການກວດສອບ photoelectric.
6. ເຊັນເຊີ Photoelectric A: ການກວດພົບສັນຍານ photoelectric double; ເຊັນເຊີ photoelectric B: ການກວດພົບສັນຍານ photoelectric ດຽວ.
7. ຄວາມໄວມໍເຕີ (ຄວາມຖີ່ຂອງການບັງຄັບ) ຊ່ວງ: 30 – 45 rpm ແລະປັບຢ່າງຕໍ່ເນື່ອງ.
8. ຄວາມຫມັ້ນຄົງຂອງຄວາມໄວມໍເຕີ: ຫນ້ອຍກວ່າ 0.05%, ຮັບປະກັນວົງຈອນການທົດສອບທີ່ຫມັ້ນຄົງ.
9. ການກໍານົດຄວາມແຕກຕ່າງຂອງໄລຍະ.
ສອງວິທີການກໍານົດຄວາມແຕກຕ່າງຂອງໄລຍະ: stroboscopic ແລະ metrological, ມີ deviation ຫນ້ອຍກວ່າ 3 °ລະຫວ່າງສອງວິທີການ.
ໄລຍະການວັດແທກຂອງວິທີການວັດແທກແມ່ນລະຫວ່າງ 50° ແລະ 160°.
ໄລຍະການວັດແທກ stroboscopic ລະຫວ່າງ 0° ແລະ 180°; ການວັດແທກຄວາມບ່ຽງເບນຊ້ຳໆ <2°.
10. ແຟລດ: ໄດແຮງດັນຕໍ່າ, ແຟລດແຍກອອກຈາກຕົວທົດລອງ, ເວລາແຟດ 2ms ຢ່າງຕໍ່ເນື່ອງ, ສີທີ່ຈັບຕາເປັນສີແດງ.
11. ສຽງດັງໜ້ອຍ, ບໍ່ມີສິ່ງລົບກວນ ຫຼື ຄວາມບໍ່ສະບາຍໃນລະຫວ່າງການທົດລອງກຸ່ມ.
Pohl resonance ຄວບຄຸມການທົດລອງ.
1. ເຄື່ອງຄວບຄຸມການທົດລອງພິເສດຖືກນໍາໃຊ້ເພື່ອເກັບກໍາແລະສະແດງຂໍ້ມູນ; ຈໍສະແດງຜົນ LCD dot-matrix ຂະຫນາດໃຫຍ່ຖືກນໍາໃຊ້, ມີເມນູເພື່ອແນະນໍາການທົດລອງ, ບັນທຶກການກະຕຸ້ນເຕືອນ (ຄູ່ມືການສອນເອເລັກໂຕຣນິກ), ແລະສະແດງແລະກວດເບິ່ງຂໍ້ມູນການທົດລອງຄືນ.
2. ການໂຕ້ຕອບການຄວບຄຸມທີ່ອຸທິດຕົນສໍາລັບ strobes.